One of the big projects on the boat over the past few months has been installing a new set of electronic instruments. I bought the boat with original kit still installed – speed and depth sensors, and a Loran setup for navigation. From the first owner’s receipts I can see that it all added an extra $20,000 to the price of the boat! I didn’t even need to check if it still worked. It may well have done, considering how fastidious the previous owner was about cleaning… or maybe it didn’t, since I don’t think he was so hot on the sailing side of things. The reefing lines weren’t even set up properly. But I digress.

I spent weeks researching options whilst still in the UK. I knew I wanted a modern below-decks autopilot which was going to need a modern boat network system, and pretty much most of the other stuff hung off that. Warning – this is probably going to turn into quite a technical post! So, having chosen to buy the Raymarine Evolution system, it meant that Raymarine stuff was the most sensible for the rest of the system. I needed new speed and depth sensors, new wind speed and direction sensors, and some way to tell the autopilot where we were going and how fast we were travelling (Course Over Ground and Speed Over Ground from a GPS). Because there was no wind instrument before, it also meant I had to run wires all the way to the masthead. There were no masthead nav lights either, other than an old non-functional anchor light – so whilst I was up there I planned to add an all-round tricolor. I considered LED for this, but having read too many stories about excess VHF interference after a few months, I decided on classic tried and tested incandescent light bulbs. Hey, I can always switch the bulbs for LED ones later.

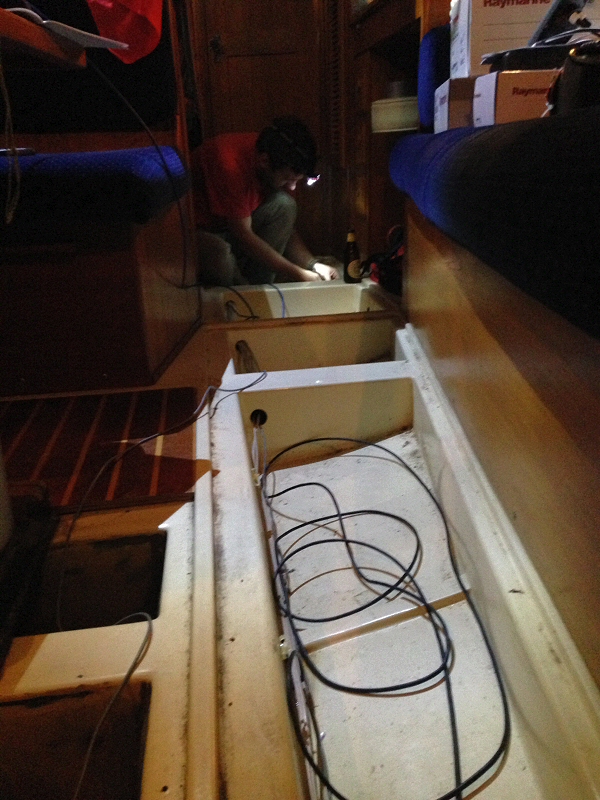
Once all the kit arrived it was a case of spending a good few evenings routing wires around the boat ready to add the sensors and other gubbins. At the masthead is the Raymarine wind jobby, with a wire that runs down the inside of the mast to a converter device under the forward saloon seat which converts the signal into the SeaTalkNG that the rest of the network needs. Also plugged into this is the speed/depth/temperature tri-ducer, which needs the boat to be hauled out of the water before I can fit it. I’ve an i70 display unit at the chart table, and one at the helm. There’s also the autopilot control head at the helm. I modified the original instrument pod at the helm with a new plastic fascia. Not too glamorous, but waterproof and solid.

The Evolution course computer and drive controller sit out of harm’s way at the back of the huge cockpit locker.
Rose hauled me up the mast one Saturday to get the wires in. Fortunately the messenger line was still intact (a line added by the manufacturer for just this purpose). The idea is that you tie your wires to it, then haul the line down through the mast. I fed them down from the top with Rose pulling from the bottom. It’s a keel stepped mast which made this job easier than I expected – though it still took a good few hours. I was still up the mast as it got dark, not yet finished. An hour or so later I was nearly hypothermic, so had to abort for the day. Everything was connected and fixed on – just the mast cap needed bolting down.




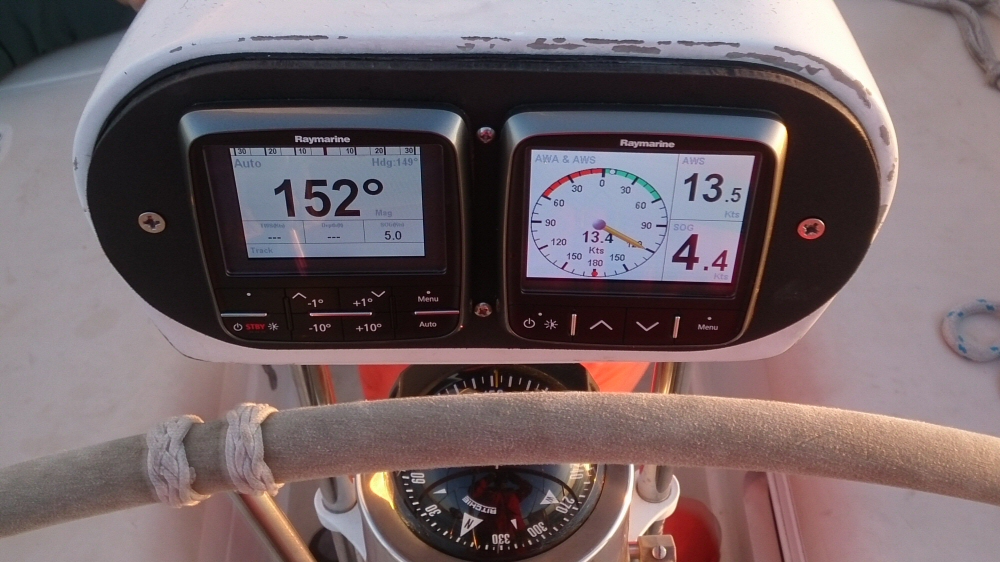
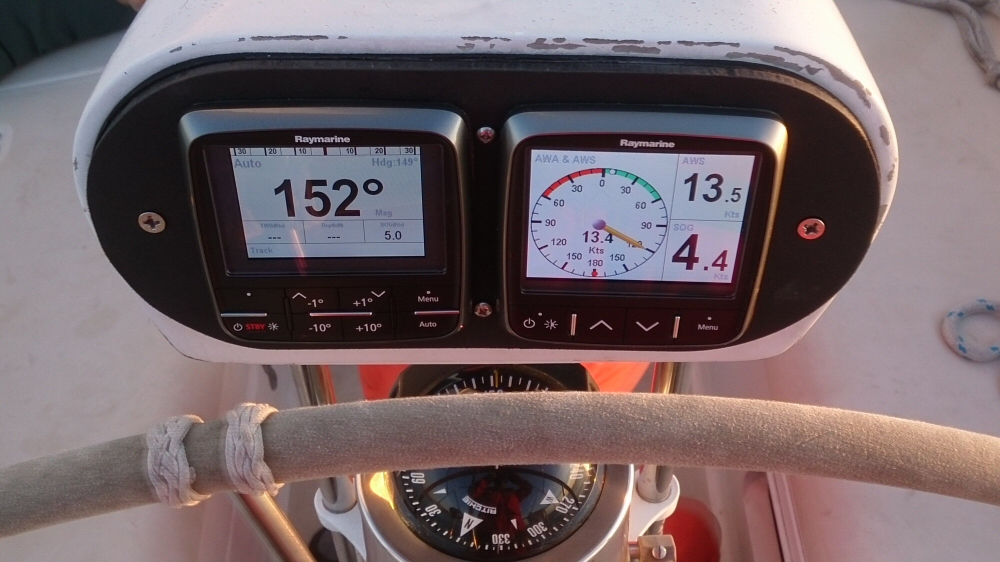
Once everything was plugged in (apart from the autopilot drive unit, which needs some serious engineering / fabrication that’s beyond the odd evening’s work), I fired up the system and the displays came online. Sweet. Now I could see the wind speed and direction at least. A couple of nights later it got pretty windy. We never had technowizardry like this on Rancote, so it’s all going to feel rather extravagant.

I spent some time hunting a good deal on eBay for a GPS unit and ended up with a Garmin 17x NMEA2000 unit for 90 bucks. Pretty good. Better than the $300+ that Raymarine are asking for one of their units. That went in without any problem, so now we can see where we are. One of the challenges is that the instrument network is uses a system called SeaTalkNG (which is compatible with NMEA2000), but the VHF radio I bought in April, perhaps a little prematurely, only interfaces with a GPS signal on NMEA0183. I’ll figure that one out later.
And that just left the autopilot drive unit to install. This was going to be the biggest challenge, and needed some thinking time. It’s a beast of a machine which can pull up to 750 pounds on the rudder, which means it needs to be mounted REALLY strongly somewhere in the transom. As it’s such a critical piece of the project, and as I’m by no means a fibreglass construction pro, I thought I might get the guys at the local yard to do this. After getting a quote for well over $2000 I soon changed my mind. They wanted to haul the boat out of the water to get it closer to their air powered tools, and whilst it was out give it a new coat of paint on the bottom. The local yard doesn’t let you do your own work due to environmental regulations, so we had to pay labour for painting … anyway it was all going to be well over budget so I decided to do it myself.
After a load of templating with cheap, thin timber I put together a solid marine ply shelf that was screwed and glassed in over the period of a couple of days. It’s solid. And now I’ve the confidence to tackle most other fibreglass jobs that come along. Granted, it’s not the most beautiful of jobs, but hidden away down there nobody minds. Finally I bolted down the drive unit, hooked it up and we were in business. The Evolution autopilot “dockside wizard” took a few seconds to run through and then we were running. Just in time for our cruise over the bay to see the new year fireworks. Let’s see how it all runs when we get to sea.
The last piece of the puzzle is to get the speed/depth sensor put in, which I’m going to do when we haul the boat out for a bottom paint at Napa Valley Marina in January. The depth sensor actually works from inside the boat if I mount it into a short piece of PVC tube filled with water – which is great for the trip up the river but of course not a permanent job.
